

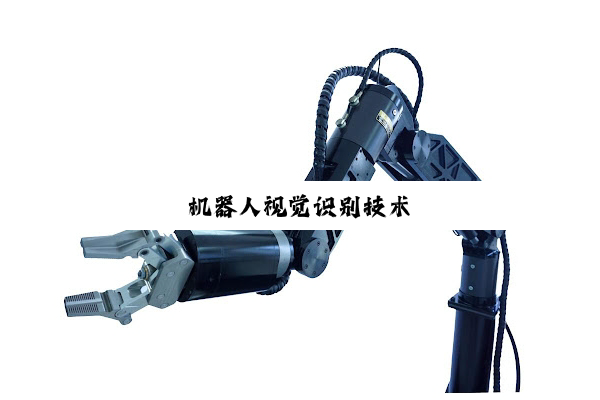
今日科普|机器人视觉识别技术
机器人视觉识别技术的核心原理可概括为“视”与“觉”两部分。“视”的环节,主要是将外界信息转化为数字信号,以供计算机处理。这一过程涉及一系列硬件设备,如光源、相机、图像采集卡以及视觉传感器等,它们共同协作,将图像信息捕捉并传输给计算机。而“觉”的环节,则是计算机对数字信号进行深入的处理和分析,以提取有用的信息和特征。这一部分主要依赖于软件算法,通过计算机的强大计算能力,对图像进行解析、识别和判断。据
2025-02-02

【科普解答】科沃斯扫地机器人DG36:智能家居中的语音控制探索与实践
1. 小爱同学携手万能遥控器,几乎能够驾驭我生活中所有依赖红外遥控的家电设备,展现出无与伦比的兼容性与控制力。然🌍而,对于采用蓝牙与射频技术的智能家电,其掌控范围尚待拓展。2. 至于控制课程的能力,这无疑是一个值得深入探讨的话题。若小爱同学具备超乎寻常的智能与潜力,那么她理论上完全有可能涉足这一领域。但关键在于,我们需要审视她背后的规划与能力布局,以确定她是否真正具备这样的实力。3. 这款
2025-02-02

今日科普|AI在视觉机器人应用
在医疗领域,AI视觉技术结合机器人技术,正逐步改变传统的医学影像分析方式。据最新研究显示,AI算法已经可以比放射科医生更好地从医学影像中识别出病症,如骨折、肺炎等。例如,谷歌开发的图像识别算法能够检测糖尿病视网膜病变的迹象,准确率堪比人类专家。腾讯的AI产品“腾讯觅影”则能够通过扫描上消化道内镜图片筛查食管癌,对早期食管癌的识别准确率高达90%。这些数据表明,AI在医疗影像分析中的应用,不仅提高了
2025-02-02
视觉陀螺导航扫地机
视(shì)觉(jué)陀(tuó)螺(luó)导(dǎo)航(háng)扫(sǎo)地(de)机(jī)结(jié)合(hé)了(le)视(shì)觉(jué)导(dǎo)航(háng)与(yǔ)陀(tuó)螺(luó)仪(yí)导(dǎo)航(háng)两(liǎng)种(zhǒng)技(jì)术(shù)。视(shì)觉(jué)导(dǎo)航(háng)通(tōng)过(guò)摄(shè
2025-02-02
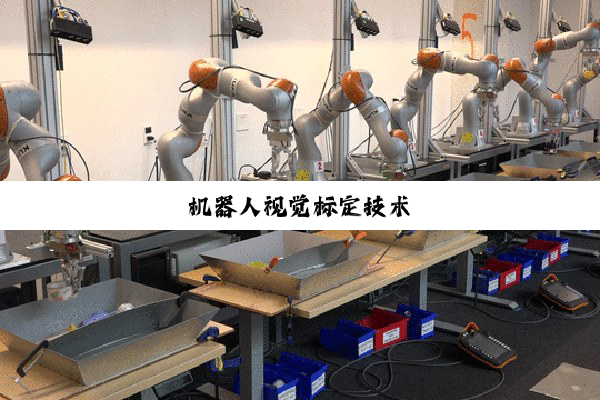
今日科普|机器人视觉标定技术
机器人视觉标定技术,简(jiǎn)而(ér)言之,是通过一系列精密的操作和算法,建立机器人视觉系统与世界坐标系之间的关系,从而实现机器人对外部环境的精准感知和理解。这一过程涉及手眼标定、相机标定等多个关键环节。手眼标定旨在建立视觉像素坐标系与机器人基坐标系之间的关系,使机器🔋人能够根据视觉信息完成精确的抓取、定位等动作。而相机标定则主要关注相机的畸变校正,通过精确的标定过程,将相机的像素坐
2025-02-01
今日科普|MV视觉机器人的应用
MV视觉机器人在制造业中最直观的应用之一便是质量检测。据相关数据显示,机器视觉系统能够高效检测产品表面的缺陷、尺寸偏差以及装配错误等,确保产品符合质量标准。例如,在半导体制造、汽车制造等行业,MV视觉机器人通过对图像的分析和处理,可以自动识别出微小的缺陷,大大提高了产品质量和生产效率。据统计,引入MV视觉机器人后,这些行业的缺陷检测率提高了约30%,同时降低了20%以上的人工成本。二、3D视觉技术
2025-02-01
齐护机器人视觉技术
机器人视觉技术是通过模拟人类的视觉系统,让机器人能够感知和理解周围环境的一种技术。它主要由图像获取、图像处理和图像理解三个部分组成。图像获取阶段🆖,机器人通过摄像头等传感器获取周围环境的图像信息;图像处理阶段,涉及一系列复杂的算法和技术,如图像滤波、边缘检测、特征提取等;图像理解阶段,机器人利用机器学习和人工智能技术理解图像信息,以识别物体、判断姿态、估计距离等。这一技术对于实现机器人的自
2025-02-01

库卡机器人视觉编程技巧
库卡机器人视觉编程是建立在机器人运动学和动力学原理基础上的高级编程技术。它利用机器人上的视觉传感器,如3D相机,来获取环境信息和物体位置,从而实现更智能化的控制和操作。3D相机通过激光扫描得到物体轮廓的点云,并计算出预先设置好的特征,进而确定机器人的TCP(工具中心点)位置。这一过程需要机器人知道自身的BASE坐标系、TCP位置以及抓取姿态等信息,这些信息通常通过标定和信息录入获得。二、视觉抓取与
2025-01-31

今日科普|伯朗特机器人视觉应用
伯朗特机器人在视觉应用上的核心优势在于其高精度、高效率的视觉识别系统。该系统依赖于先进的机器视觉技术,通过工业相机、红外线仪等成像手段,将物理量转换为电信号,再经图像采集设备采样、量化后生成数字图像进行分析处理。据伯朗特官方发布的信息,其高配版2D视觉系统像素已提升至500万,甚至800万分辨率,能够实现对复杂视觉检测任🈚务的精确处理。这种高精度视觉系统不仅提高了识别的准确度和速度,还为机
2025-01-31