

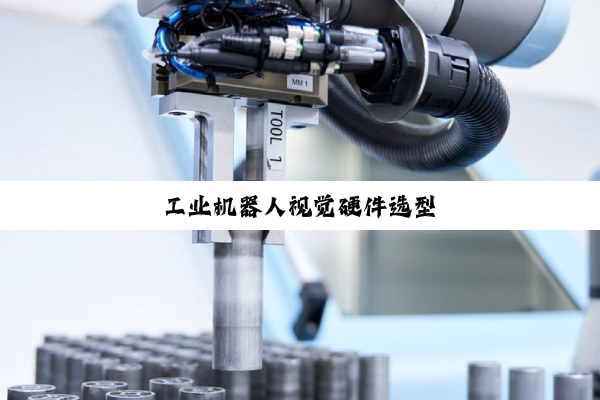
今日科普|工业机器人视觉硬件选型
摄像头与镜头是工业机器人视觉系统的核心组件,直接影响系统的成像质量和识别精度。在选择摄像头时,需要考虑图像分辨率、帧率、光谱响应范围等参数。例如,面阵相机适用于一般的二维图像采集任务,广泛应用于工业场景中;而线阵相机则在高速运转环境下表现出色,特别是(shì)在(zài)生(shēng)产(chǎn)线(xiàn)上(shàng)实(shí)时(shí)检(jiǎn)测(cè)的(de)情(qín
2025-01-10

今日科普|机器人视觉技术概要
机器人视觉的基本原理是通过摄像头或其他传感器获取周围环境中的图像和视频,然后利用计算机视觉算法对这些图像和视频进行处理和分析,以提取有用的信息。为了实现目标检测、跟踪和识别等任务,机器人视觉需要使用高效的算法和技术,如快速特征提取算法、快速目标检测算法等。这些算法通过并行计算技术,将图像和视频处理任务分成多个部分并行计算,从而提高处理速度和效率。此外,高性能的传感器,如高分辨率摄像头和高帧率摄像头
2025-01-10

今日科普|机器人视觉的功能作用
机器人视觉的核心功能之一是目标识别与定位。通过摄像头等传感器获取外界的图像信息后,机器人需要进行图像处理,包括图像增强、去噪、分割等步骤,以提高图像质量。在此基础上,机器人从图像中提取出有用的特征信息,如颜色、形状、纹理等,利用机器学习或深度学习算法对这些特征进行分类和识别。例如,在ImageNet挑战赛中,深度🥕·&#
2025-01-10

3D机器人视觉定位技术
3D视觉定位的技术原理主要包括相机标定、特征提取、深度估计和姿态估计。通过采集一组已知位置的图像数据,系统能够计算和校准相机的内外参数,建立相机和物体之间的坐标映射关系。特征提取利用计算机视觉技术提取图像中的关键点或特征向量,用于后续的物体定位和姿态估计。深度估计通过分析图像中的纹理、灰度或结构信息等,推测出物体到相机的距离或深度。姿态估计则通过计算物体的旋转矩阵或欧拉角,即物体的姿态信息。这种技
2025-01-10
今日科普|机器人视觉导引精确度
机器人的视觉导引精确度主要依赖于其视觉能力、导航算法以及环境感知能力。首先,机器人的视觉能力通过摄像头和传感器等设备获⛵️取环境中的视觉信息,并进行分析和处理。然而,这一过程受到光照条件、目标物体的形状和颜色等多种因素的制约。为了提高视觉能力,研究人员引入了深度学习算法,增加了传感器的种类,从而提高了目标检测和识别的准确性。例如,CMOS相机因其体积小、价格低、功耗低等优势,在工业机器人中得
2025-01-09
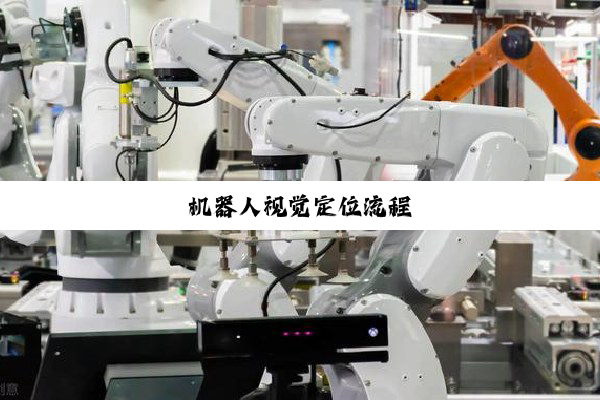
今日科普|机器人视觉定位流程
机器人视觉定位系统的核心组件主要包括光学成像模块、图像传感器、图像处理模块以及输入输出(IO)模块。在光学成像模块中,通过精心设计的光源与光路布局,物体空间的信息被精确投射至成像面,从而捕获目标物的物理特性。图像传感器模块则将光信号转化为电信号,传输给图像处理模块。图像处理模块是视觉定位技术的关键所在。它依托高性能的CPU或专用信息处理芯片,结合完善的图像处理方案与算法库,对接收到的图像信号进行一
2025-01-09

今日科普|广州3D机器人集成方案
3D机器人集成方案的核心在于高精度3D视觉技术和灵活的运动控制系统。例如,迈尔微视联合威迈尔VMR打造✅·登录的全球首款纯视觉类人形机器人VersaBot(威宝),结合了先进的3D视觉方案与灵活的运动控制系(xì)统(tǒng),能(néng)够(gòu)高(gāo)效(xiào)应(yīng
2025-01-09
今日科普|ROS与机械视觉对比
ROS(Robot Operating System)是一个开源的机器人操作系统框架,旨在支持机器人软件开发的标准化和共享。ROS提供了丰富的工具、库和约定,使开发者能够更快速地构建、测试和部署各种类型的机器人应用。ROS的核心功能包括消息传递、包管理、运行时图、参数服务器等,这些功能共同构建了一个灵活、可扩展和分布式的环境。ROS的应用领域广泛,包括工业机器人、服务机器人、移动机器人和无人机等。
2025-01-09
今日科普|机器人外观检测批发
近年来,我国机器人产业呈现出蓬勃发展的态势。据数据显示,2025年我国工业机器人产量达到36.6万台,比2025年增长了10倍,市场规模稳居全球首位。这一增长背后,是机器视觉等核心技术的不断突破。机器视觉相当于为工业机器人装上了“眼睛”,使其能够清晰地识别物体,进行高效的外观检测。这种技术在高度自动化的大规模生产中至关重要,不仅提高了生产效率,还确保了产品质量。二、机器人外观检测的应用场景机器人外
2025-01-09